
随着科学技术的不断进步,自动驾驶的应用前景越来越广泛。未来,自动驾驶车辆可能会成为城市交通的重要组成部分,与传统交通方式相互配合,实现更加高效、智能的出行。同时,自动驾驶技术也将推动汽车产业的转型升级,促进相关产业的发展,如车载夜视系统、激光雷达系统等。
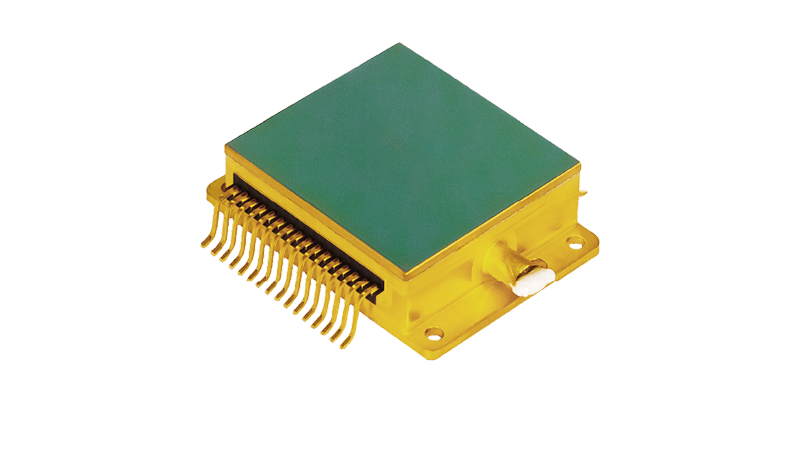
车载夜视系统
红外热成像技术在车载夜视系统中发挥着重要作用,不仅提高了车辆的感知能力,还为驾驶安全提供了额外的保障。随着技术的进步和应用的深入,红外热成像技术有望在未来的车载夜视领域发挥更大的作用。
红外热成像技术能够在低照度、雨雪、烟尘、雾霾等恶劣环境下清晰成像,有效提高车辆的全时感知能力;红外热成像技术对生命体具有高敏感度,可在夜间或恶劣天气条件下准确检测出行人或动物的存在,及时进行预警或避让,提高行驶安全;红外热成像技术可作为驾驶员的辅助视觉,在夜间驾驶、强光照射、雨雾天气、会车眩光等特定情况下帮助驾驶员感知周围环境,提高驾驶安全;红外热成像技术不受眩光、雾霾、烟尘等环境因素的影响,具有强大的抗干扰能力,增强了车载夜视系统的可靠性;红外热成像技术可以与摄像头、雷达、激光雷达等其他传感器数据融合,提高车载夜视系统的冗余性和容错性,提高决策的效率和准确度。
多家车企已经开始在新车中批量搭载红外系统,这表明红外热成像技术在车载夜视系统中具有广泛的应用前景。
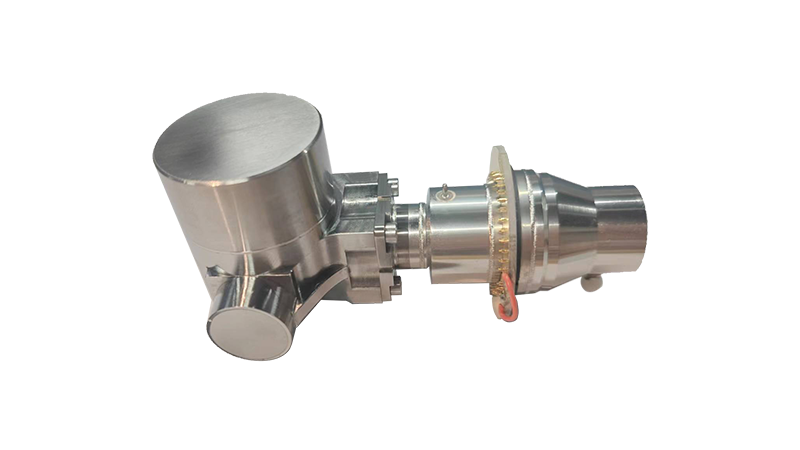
激光雷达系统
激光雷达系统在自动驾驶中发挥着至关重要的作用。
1、环境感知与建模
激光雷达通过发射激光束并接收反射回来的信号,能够精确测量车辆周围物体与自身的距离、角度和方位等信息,构建出详细的三维空间模型。例如,在行驶过程中,可准确感知前方道路、建筑物、树木、其他车辆等物体的位置和形状。激光雷达能够快速扫描周围环境,实时跟踪目标物体的运动状态和变化,如其他车辆的行驶速度、方向以及行人的移动轨迹等,为自动驾驶系统提供及时的环境动态信息,以便做出准确的决策。
2、目标检测与识别
激光雷达可精准识别出行驶路径上的各种障碍物,包括静态的障碍物(如路障、墙壁、电线杆等)和动态的障碍物(如其他车辆、行人、动物等),并确定其位置、大小和形状,帮助车辆提前规划避让路径。
交通标志和信号识别:可以识别交通标志(如限速标志、停车标志、路口指示标志等)和交通信号灯的状态,辅助车辆遵守交通规则,做出正确的行驶决策,如在红灯时停车、根据限速标志调整车速等。
3、定位与导航
结合全球定位系统(GPS)、惯性测量单元(IMU)等其他传感器的数据,利用激光雷达获取的环境信息进行多传感器融合定位,提高车辆定位的精度和可靠性,确定车辆在地图上的准确位置。根据感知到的环境信息和目标位置,为车辆规划出安全、高效的行驶路径,避开障碍物和危险区域,引导车辆顺利到达目的地。例如,在城市道路中选择最佳的行驶路线,在高速公路上进行合理的车道变换和超车决策等。
4、可通行空间检测
激光雷达可明确车辆周围可安全行驶的区域,即可通行空间。通过对道路边界、障碍物间隙以及空旷区域的检测和分析,确保车辆在行驶过程中始终处于安全的区域内,避免驶入不可通行的区域,如坑洼地带、施工区域等。
5、多传感器标定
由于自动驾驶车辆通常配备多种类型的传感器(如摄像头、毫米波雷达等),激光雷达可以用于这些传感器之间的标定,确定它们在车辆坐标系下的相对位置和姿态关系,使得不同传感器获取的信息能够准确地融合和匹配,从而为自动驾驶系统提供更全面、准确的环境感知信息。
6、仿真与测试
在自动驾驶系统的开发和测试过程中,激光雷达可以为仿真平台提供真实的环境数据,模拟各种复杂的驾驶场景和路况,帮助开发人员验证自动驾驶算法的性能和可靠性,降低实际路测的成本和风险,提高开发效率。
 400-623-5308
400-623-5308































































 您的信息正在受保护
您的信息正在受保护